


ක්රියාකාරීත්වයේ මූලධර්මයග්රහලෝක රෝලර් ඉස්කුරුප්පුවයනු: ගැලපෙන මෝටරය ඉස්කුරුප්පුව භ්රමණය කිරීමට ධාවනය කරන අතර, දැල් රෝලර් හරහා මෝටරයේ භ්රමණ චලිතය ගෙඩියේ රේඛීය ප්රත්යාවර්ත චලිතය බවට පරිවර්තනය වේ. ග්රහලෝක රෝලර් ඉස්කුරුප්පුව සර්පිලාකාර චලිතය සහ ග්රහලෝක චලිතය ඒකාබද්ධ කරයි, එය ඉහළ කාර්ය සාධන අවශ්යතා සහිත විස්තීර්ණ තත්වයන් සඳහා ඉතා සුදුසු වේ.
ග්රහලෝක රෝලර් ඉස්කුරුප්පුව රූපයේ දැක්වේ. එහි ප්රධාන සංරචක වන්නේ:
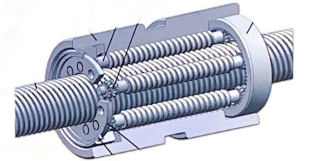
ඉස්කුරුප්පු ඇණ, එහි නූල් පැතිකඩ සෘජුකෝණාස්ර ත්රිකෝණයකි (හිස් 3ක් සහ ඊට වැඩි නූල්)
ගෙඩි, එහි අභ්යන්තර නූල් පැතිකඩ ඉස්කුරුප්පු ඇණෙහි පැතිකඩට සමාන වේ.
රෝලර්, තනි-ආරම්භක නූල්, එක් එක් රෝලරයේ කෙළවරේ සිලින්ඩරාකාර හැරීමක් සහ ගියර් හැරීමක් බැෆල් එකේ වටකුරු සිදුරේ සවි කර ඇති අතර එමඟින් රෝලර් රේඩියල් දිශාවට ඒකාකාරව බෙදා හරිනු ලැබේ. ගියර් දත් අභ්යන්තර මුදු ගියරය සමඟ ඒකාබද්ධ වන අතර එමඟින් රෝලරය සුමටව ඉදිරියට ධාවනය කිරීමට ඉඩ සලසයි.
Rඑටේනින් මුද්ද,බැෆල් එක අගුළු දැමීම.
පැතලි යතුරධාවනය වන වස්තූන් සම්බන්ධ කිරීමට භාවිතා කරයි. එය සරල ව්යුහයක් ඇත, විසුරුවා හැරීමට සහ එකලස් කිරීමට පහසු වන අතර හොඳ හෙජින් ගුණාංග ඇත. එය අධිවේගී, විචල්ය බර සහ බලපෑම් තත්වයන් සඳහා සුදුසු වේ.
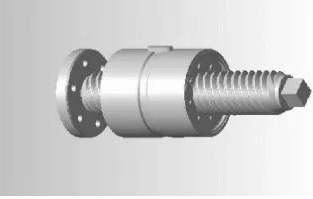
ප්රතිලෝම ග්රහලෝක රෝලර් ඉස්කුරුප්පු ඇණ, ප්රතිලෝම රෝලර් ඉස්කුරුප්පු ඇණ සහ ප්රතිලෝම ග්රහලෝක රෝලර් ඉස්කුරුප්පු ඇණ ලෙසද හැඳින්වේ, එය සාම්ප්රදායික ග්රහලෝක රෝලර් ඉස්කුරුප්පු ඇණකට ප්රතිවිරුද්ධ රෝලර් සැකැස්ම හෝ චලන දිශාව ඇති රේඛීය සම්ප්රේෂණ උපාංගයකට යොමු කරයි.
ප්රතිලෝම ග්රහලෝක රෝලර් ඉස්කුරුප්පු ඇණ කුඩා ප්රමාණයකින් සහ විශාල බරකින් යුක්ත වේ. රාමු රහිත මෝටරයක් සමඟ, එය හියුමනොයිඩ් රොබෝ අත්, කකුල්, උකුල් සන්ධි ආදිය සඳහා භාවිතා කළ හැකිය.
සම්මත ග්රහලෝක රෝලර් ඉස්කුරුප්පු වලට අධික වේගය, ශක්තිමත් බර දරණ ධාරිතාව සහ ඉහළ නිරවද්යතාවයේ වාසි ඇත. ඵලදායී පහර මීටරයකට වඩා ළඟා විය හැකි අතර, ඒවා අතිශයින් අධික බර පරිසරයන් සඳහා ඉතා සුදුසු වේ.
ඉස්කුරුප්පු නව මුදා හැරීමේ ස්ථානය සඳහා හියුමනොයිඩ් රොබෝ. ට්රැපෙසොයිඩ් ඉස්කුරුප්පු ඇණ සහබෝල ඉස්කුරුප්පුවයාන්ත්රික යන්ත්ර මෙවලම් ක්ෂේත්රයේ පරිණත යෙදුමක් ඇති අතර, ග්රහලෝක රෝලර් ඉස්කුරුප්පු ඇණ දැනට ගුවන් සේවා සහ අනෙකුත් ඉහළ මට්ටමේ යෙදුම්වල පමණි. ටෙස්ලා හියුමනොයිඩ් යන්ත්රය 14 රේඛීය යතුර 8-10 රෝලර් ඉස්කුරුප්පු භාවිතා කරනු ඇත.
පළ කිරීමේ කාලය: දෙසැම්බර්-06-2024




