

නිෂ්පාදන



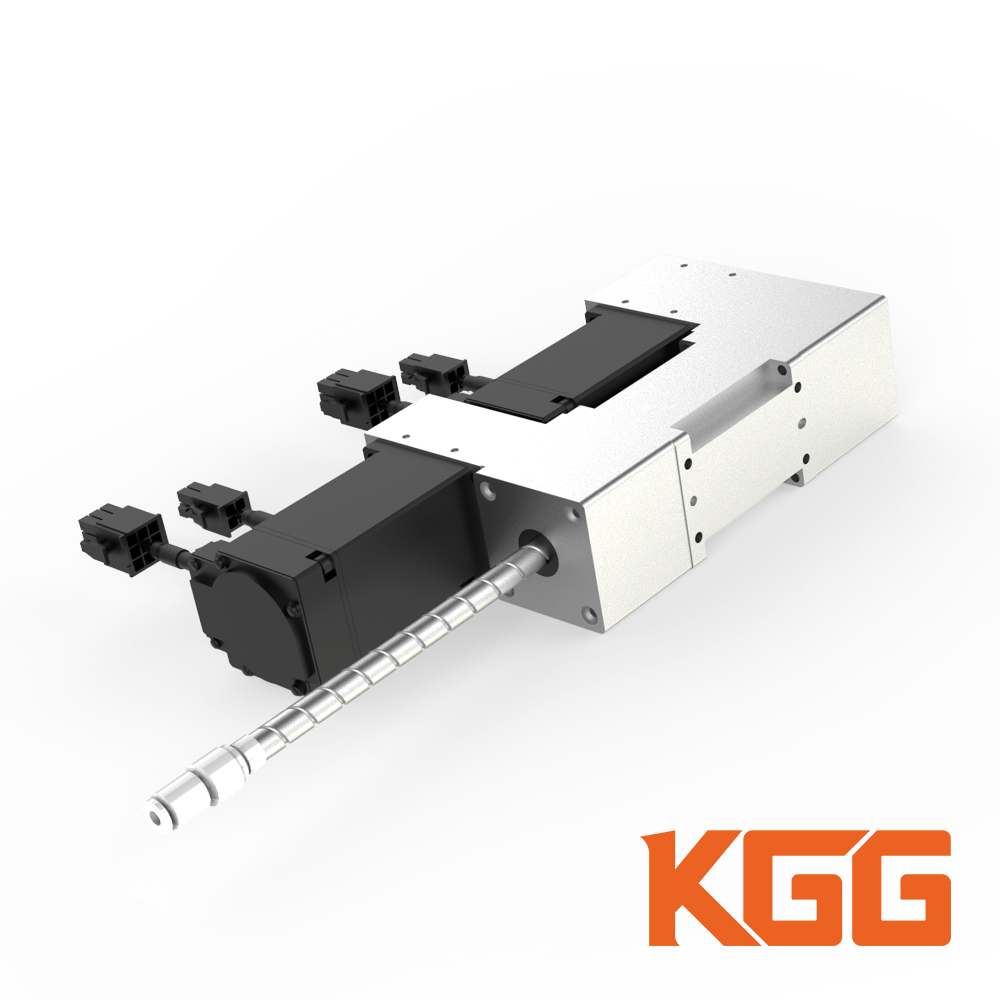


ZR අක්ෂ ක්රියාකරු
ZR අක්ෂ ක්රියාකරු, ඉහළ සහ පහළ රේඛීය චලනයක් ලබා ගැනීම සඳහා බෝල ඉස්කුරුප්පු ඇටය කරකැවීම සඳහා Z අක්ෂය ධාවනය කිරීම සඳහා කුහර මෝටරයක් භාවිතා කරයි, එම අවස්ථාවේදී බෝල ස්ප්ලයින් නට් ඉස්කුරුප්පු අක්ෂය සඳහා නැවතුම් සහ මාර්ගෝපදේශක ව්යුහයක් ලෙස ක්රියා කරයි. බෝල ඉස්කුරුප්පු ඇටය සහ බෝල ස්ප්ලයින් නට් එකම වේගයකින් සහ එකම දිශාවකට භ්රමණය වන අතර එමඟින් ඉහළ සහ පහළ රේඛීය චලිතයකින් තොරව ධාවක පතුවළේ ස්ථානීය භ්රමණය ලබා ගනී. වේගවත් සංරචක හැසිරවීම සඳහා කාලය ඉතිරි කර ගැනීම සඳහා ZR පතුවළ ක්රියාකරු බහු අක්ෂ සමඟ භාවිතා කළ හැකිය.
නිෂ්පාදන වාසි:
01. අක්ෂීය නිෂ්කාශනය 0
02. අඩු ශබ්දය සහ සුමට චලනය
03. දෙමුහුන් සංයුක්ත සහ සැහැල්ලු ඉදිකිරීම්
04. සංවෘත-ලූප් කේතක ඉදිකිරීම
05. පීඩන පාලනය කළ හැකිය

බෝල ස්ප්ලයින් සහිත බෝල ඉස්කුරුප්පු
KGG කුඩා රූපය යෙදූ නවතම නිෂ්පාදනbසියල්ලsකාර්ය මණ්ඩලය සමඟbසියල්ලsප්ලයින් (G-BSS), සහ එක් නිෂ්පාදනයක් සමඟ රේඛීය චලිතය (Z), භ්රමණ චලිතය (θ) සහ රික්තය (V) යන ශ්රිත තුනක් සාක්ෂාත් කර ගත්තේය.
සිහින් ස්වරූපය සාක්ෂාත් කරගනු ලබන්නේ a ධාවනය කිරීමෙන් ය.bසියල්ලsකාර්ය මණ්ඩලය සහbසියල්ලsප්ලයින්nසෘජුවම ගොඩනගා ඇතhඔලෝmඔටර්.

රේඛීයMඔෂන්(z)
ලින්කනමොට්iධාවනය කිරීමෙන්z-අක්ෂයmඔටෝර් සහ භ්රමණයbසියල්ලsකාර්ය මණ්ඩලයnමෙම අවස්ථාවේදී,bසියල්ලsප්ලයින්but විසින් භ්රමණ විරෝධී උපාංගයක සහ ස්ලයිඩ් මාර්ගෝපදේශකයෙකුගේ කාර්යභාරයක් ඉටු කරයි.sකාර්ය මණ්ඩලයsහැෆ්ට්.
භ්රමණය ((θ) θ)
හරවන්නbසියල්ලsකාර්ය මණ්ඩලයnut සහbසියල්ලsප්ලයින්nඑකම වේලාවක, එකම වේගයකින් සහ දිශාවකින්,sහැෆ්ට් එක ඉහළට සහ පහළට චලනය නොවී භ්රමණය වේ.
රික්තකය(V)
බෝර්hollow බහු භාවිතයන් විය හැක. උදාහරණයක් ලෙස රික්තය සහ පිඹීමේ ක්රියාකාරිත්වය.
හොලෝ මෝටරය + G-BSS (බෝල ස්ප්ලයින් සහිත කුඩා බෝල ඉස්කුරුප්පු) සංයෝජනය නිසා ඉඩ ඉතිරි කර ගැනීම සඳහා සුපර් ස්ලිම් බොඩි ප්රයෝජනවත් වේ.
ඩිරෙක්ට් ඩ්රයිව් ව්යුහය නිසා බෙල්ට් ඇන්ඩ් පුලි වලින් ගෙවී යන කුඩු නොමැත.
අවම සංරචක සංඛ්යාවක් සරල සැලසුමකට සහ ඉඩ ඉතිරි කිරීමට හේතු වේ.
42 ප්රමාණයේ මෝටරයකදී, රේඛීය (Z) සහ භ්රමණ (Θ;තීටා) චලිතය පමණක් නොව, රික්ත (V) ශ්රිතය ද ඇත.

---කුහර පතුවළ ද්රව බෙදා හැරීම
---බහු-අක්ෂ සංයෝජනය-LED සංරචක හැසිරවීම
---IC වේෆර් කෝණ ගැලපීම
---ජංගම දුරකථන කාච එකලස් කිරීම
---ජංගම දුරකථන ලේබල් කිරීම
---ඩෙමෝDඅනුකාරක
තවත් උදාහරණ සඳහා, කරුණාකර පහත වීඩියෝව මත ක්ලික් කරන්න.
ඔබට අලුත්ම සම්ප්රේෂණ පද්ධතියක් පෙනෙනු ඇත.
එය ගොඩනැගිලි කොටස් එකට එකතු කිරීම තරම් සරල වන අතර මෙහෙයුම් පරිසරය අනුව රවුම්, ධාවන පථය, හතරැස්, සංකීර්ණ ඕෆ්-රැම්ප්, පැද්දීම සහ දෙමුහුන් වැනි විවිධ පිරිසැලසුම් වර්ග සමඟ නිර්මාණය කළ හැකිය.
KGG ZR අක්ෂ ක්රියාකාරක එකවර ක්රියාත්මක වීමත් සමඟ, ප්රවාහනය තවදුරටත් සංකීර්ණ නොවේ......
| පින්තූරය |  |  |  |  |
| ආකෘතිය | ZRIN28 වර්ගය | ZRIN42 වර්ගය | ZRFS30S වර්ගය | ZRFS42S වර්ගය |
| පළල මි.මී. | 28 මි.මී. | 42 මි.මී. | 30 මි.මී. | 42 මි.මී. |
| උපරිම ගමන් මි.මී. | 50 මි.මී. | 50 මි.මී. | 50 මි.මී. | 100 මි.මී. |
| උපරිම තුෂ් බලය | 5N | 19 එන් | 30 එන් | 50 එන් |
| ඉස්කුරුප්පු විෂ්කම්භය මි.මී. | 6 මි.මී. | 8 මි.මී. | 6 මි.මී. | 8 මි.මී. |
| PDF බාගත කිරීම | * | * | * | * |
| 2D/3D CAD | * | * | * | * |
ඔබට ඉක්මනින් අපෙන් අසන්නට ලැබේවි
කරුණාකර ඔබගේ පණිවිඩය අපට එවන්න. අපි වැඩ කරන දිනක් ඇතුළත ඔබ හා සම්බන්ධ වන්නෙමු.
* ලෙස සලකුණු කර ඇති සියලුම ක්ෂේත්ර අනිවාර්ය වේ.
-

ඉහළ ඊයම් ඉහළ නිරවද්යතාවයකින් යුත් මලකඩ ආරක්ෂිත බෝල ඉස්කුරුප්පු ...
-

බෝල ඉස්කුරුප්පු සඳහා ඉහළ ලිහිසි තෙල්
-

ඉහළ දෘඪතාව ඉහළ නිරවද්යතාවයකින් යුත් පුනරාවර්තන රෝලර් L...
-

HST බිල්ට්-ඉන් මාර්ගෝපදේශක රේඛීය ක්රියාකාරකය
-

KGG GLR රේඛීය චලන නිරවද්ය බෝල ඉස්කුරුප්පු ඇණ සමඟ...
-

කුඩා මලකඩ නොබැඳෙන අධිවේගී ඊයම් සහ අධිවේගී...
-

PT විචල්ය තාරතා ස්ලයිඩය
-

ස්ටෙපින් මෝටරය සහ බෝලය / ලීඩින් ඉස්කුරුප්පු බාහිර...
-

ඉහළ දෘඪතා සංකීර්ණය නිහඬ මෙහෙයුම් බෝල්...
-

ඉහළට




